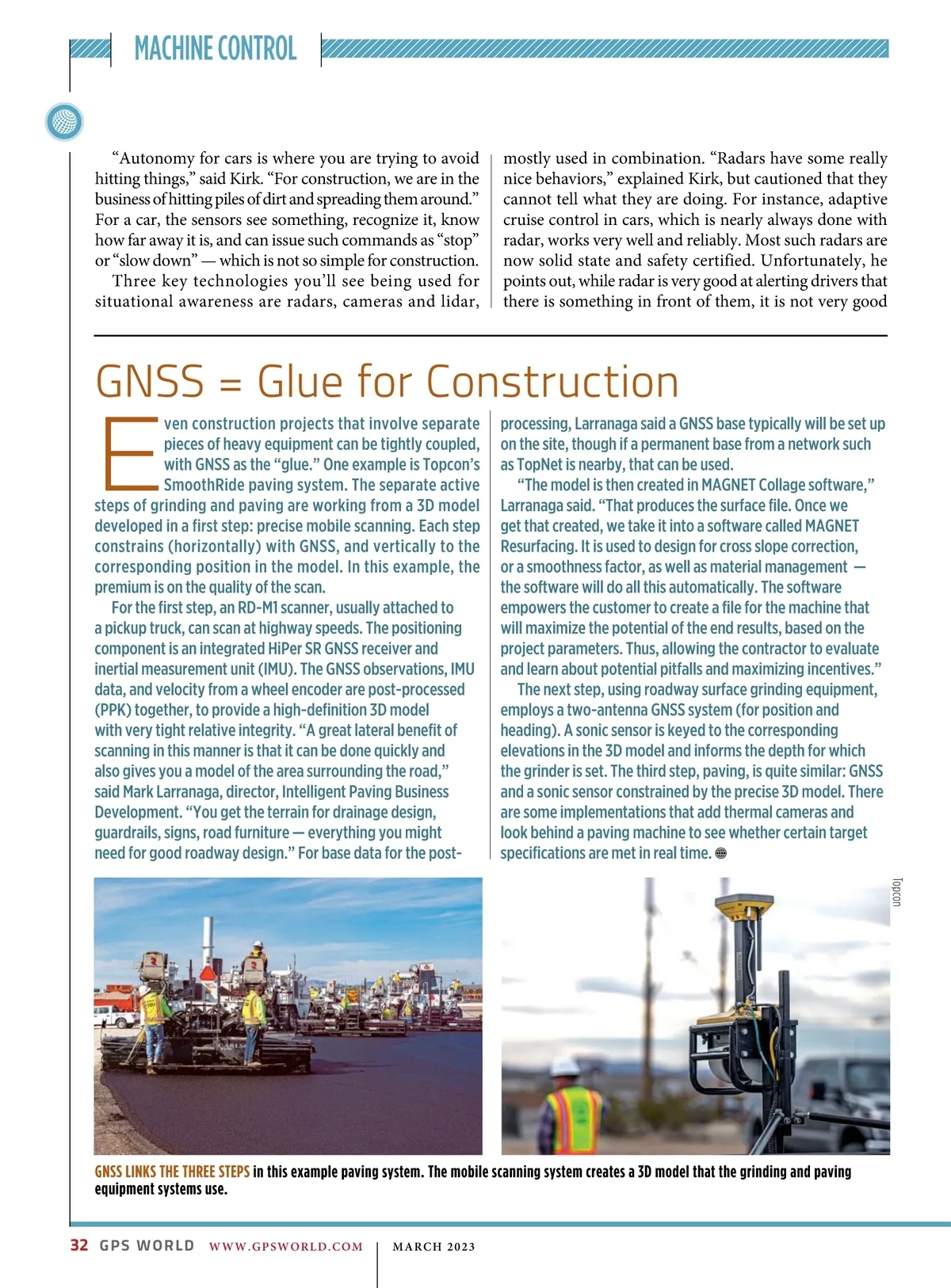
MACHINE CONTROL “Autonomy for cars is where you are trying to avoid hitting things,” said Kirk. “For construction, we are in the business of hitting piles of dirt and spreading them around.” For a car, the sensors see something, recognize it, know how far away it is, and can issue such commands as “stop” or “slow down” — which is not so simple for construction. Three key technologies you’ll see being used for situational awareness are radars, cameras and lidar, mostly used in combination. “Radars have some really nice behaviors,” explained Kirk, but cautioned that they cannot tell what they are doing. For instance, adaptive cruise control in cars, which is nearly always done with radar, works very well and reliably. Most such radars are now solid state and safety certified. Unfortunately, he points out, while radar is very good at alerting drivers that there is something in front of them, it is not very good E ven construction projects that involve separate pieces of heavy equipment can be tightly coupled, with GNSS as the “glue.” One example is Topcon’s SmoothRide paving system. The separate active steps of grinding and paving are working from a 3D model developed in a first step: precise mobile scanning. Each step constrains (horizontally) with GNSS, and vertically to the corresponding position in the model. In this example, the premium is on the quality of the scan. For the first step, an RD-M1 scanner, usually attached to a pickup truck, can scan at highway speeds. The positioning component is an integrated HiPer SR GNSS receiver and inertial measurement unit (IMU). The GNSS observations, IMU data, and velocity from a wheel encoder are post-processed (PPK) together, to provide a high-definition 3D model with very tight relative integrity. “A great lateral benefit of scanning in this manner is that it can be done quickly and also gives you a model of the area surrounding the road,” said Mark Larranaga, director, Intelligent Paving Business Development. “You get the terrain for drainage design, guardrails, signs, road furniture — everything you might need for good roadway design.” For base data for the post-GNSS = Glue for Construction processing, Larranaga said a GNSS base typically will be set up on the site, though if a permanent base from a network such as TopNet is nearby, that can be used. “The model is then created in MAGNET Collage software,” Larranaga said. “That produces the surface file. Once we get that created, we take it into a software called MAGNET Resurfacing. It is used to design for cross slope correction, or a smoothness factor, as well as material management — the software will do all this automatically. The software empowers the customer to create a file for the machine that will maximize the potential of the end results, based on the project parameters. Thus, allowing the contractor to evaluate and learn about potential pitfalls and maximizing incentives.” The next step, using roadway surface grinding equipment, employs a two-antenna GNSS system (for position and heading). A sonic sensor is keyed to the corresponding elevations in the 3D model and informs the depth for which the grinder is set. The third step, paving, is quite similar: GNSS and a sonic sensor constrained by the precise 3D model. There are some implementations that add thermal cameras and look behind a paving machine to see whether certain target specifications are met in real time. Topcon GNSS LINKS THE THREE STEPS in this example paving system. The mobile scanning system creates a 3D model that the grinding and paving equipment systems use. 32 GPS WORLD WWW.GPSWORLD.COM | MARCH 2023
GPS World March 2023: Page 32